David Mayo
I am a masters of engineering at MIT studying EECS. I am interested in artificial intelligence, machine learning, computer vision, and robotics.
I am a masters of engineering at MIT studying EECS. I am interested in artificial intelligence, machine learning, computer vision, and robotics.

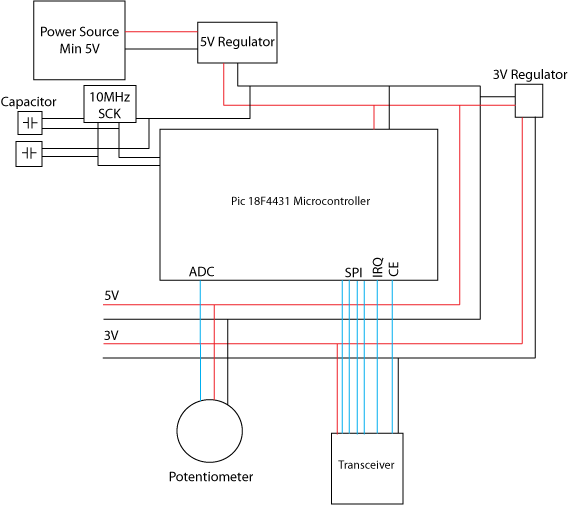
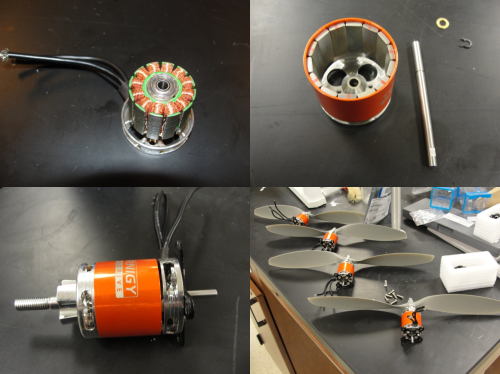
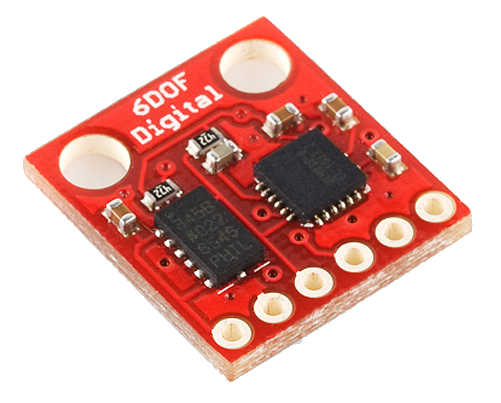
This project is a fully hand-built quadrotor, which balances itself using accelerometer and gyroscope data, and a proportional-derivative algorithm. A wireless controller, also hand-made, controls the desired average throttle of the motors, and relays this information to the quadrotor in real-time. I worked on this project with Albert Shaw and Clayton Ritcher.
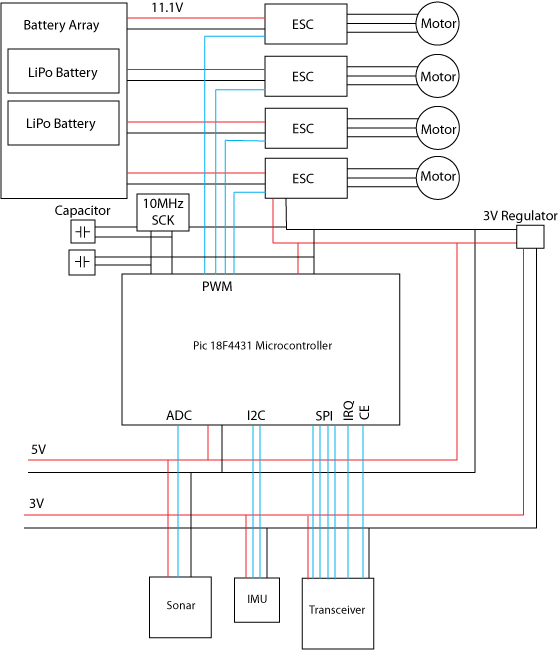
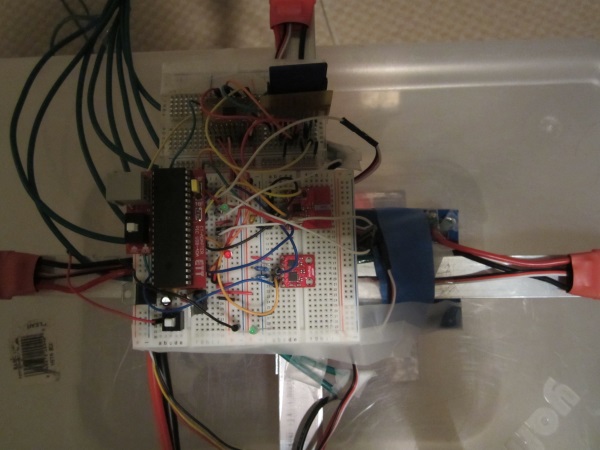
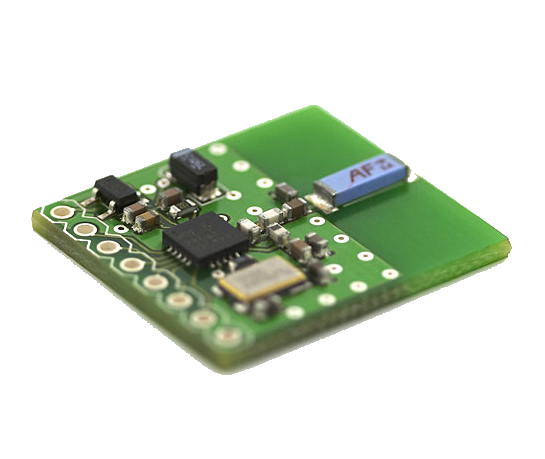
As my first venture into the world of microcontrollers, my main goal for this project was to develop my electrical engineering skills, and ultimately, make something that could fly. All of the code was written in C, and ran on a PIC microcontroller. Below is the wiring diagram for the quadrotor 'brain' as well as a picture of the 'brain':